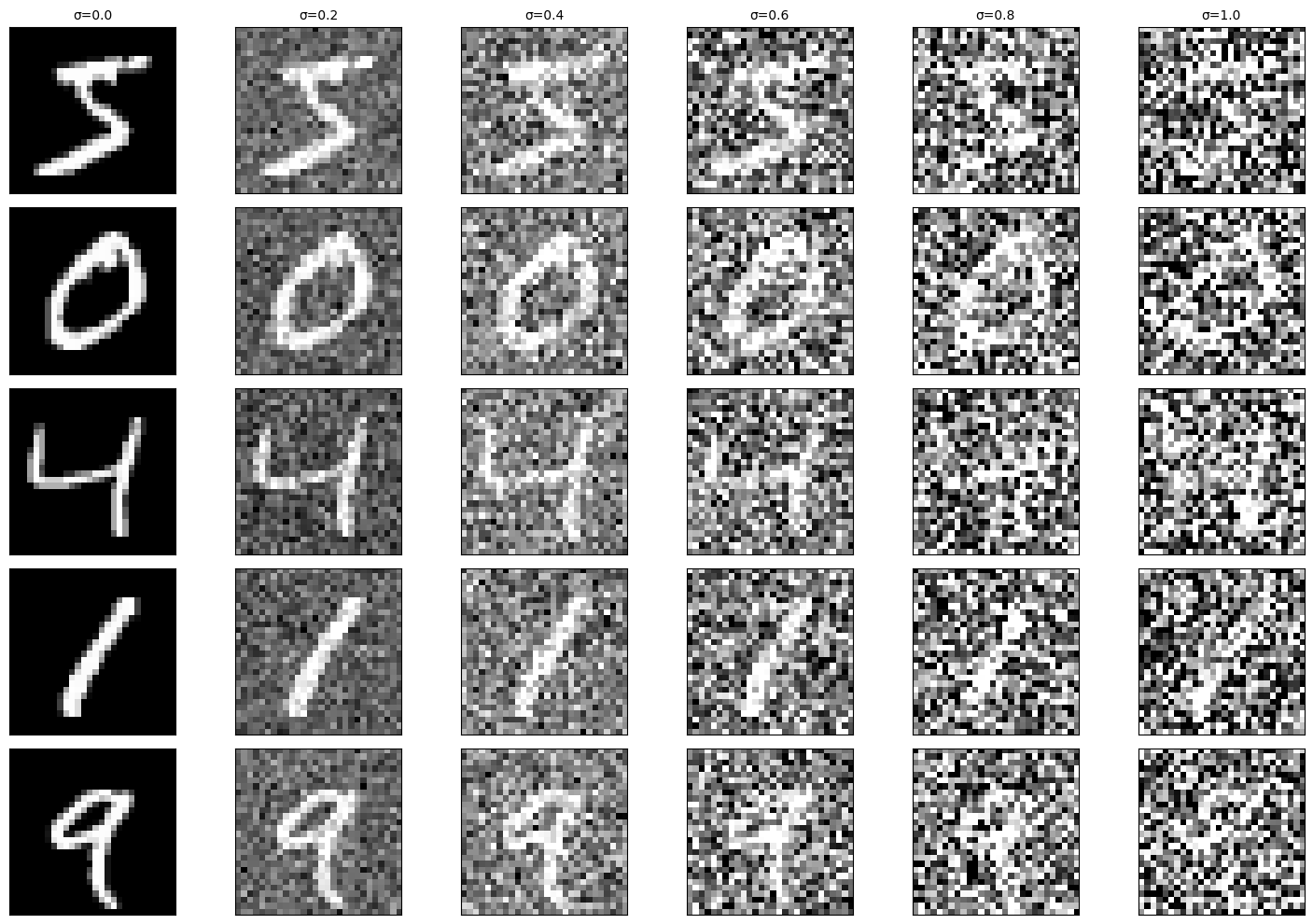
1.1 Implementing the Forward Process
In this part, we implement the noisy_im = forward(im, t) function. Down below, I have the test image at noise levels [250, 500, 750].

Berkeley Campanile

Noisy Campanile at t=250

Noisy Campanile at t=500

Noisy Campanile at t=750
1.2 Classical Denoising
We now try to denoise these images using classical methods. Down below are the noisy images from above with Gaussian blur filtering.
Noisy Campanile at t=250
Noisy Campanile at t=500
Noisy Campanile at t=750

Gaussian Blur Denoising at t=250

Gaussian Blur Denoising at t=500

Gaussian Blur Denoising at t=750
1.3 One-Step Denoising
This time, we use the pretrained diffusion model to denoise. This diffusion model was trained with text conditioning, so we use the prompt "a high quality photo."

Noisy Campanile at t=250

Noisy Campanile at t=500

Noisy Campanile at t=750

One-Step Denoised Campanile at t=250

One-Step Denoised Campanile at t=500

One-Step Denoised Campanile at t=750
1.4 Iterative Denoising
The denoising UNet worked much better, but we can still improve via iterative denoising. Down below are the noisy image every 5th loop of denoising in the iterative_denoise function, the final predicted clean image, the predicted clean image using only a single denoising step, and the predicted clean image using gaussian blurring.

Noisy Campanile at t=90

Noisy Campanile at t=240

Noisy Campanile at t=390

Noisy Campanile at t=540

Noisy Campanile at t=690

Iteratively Denoised Campanile

One-Step Denoised Campanile

Gaussian Blurred Campanile
1.5 Diffusion Model Sampling
This time, we use the iterative_denoise function and pass in random noise. Here are 5 results.

Sample 1

Sample 2

Sample 3

Sample 4

Sample 5
1.6 Classifier-Free Guidance (CFG)
In order to improve on image generation, we incorporate CFG, which is implemented in the iterative_denoise_cfg function. Here are another 5 samples using the prompt "a high quality photo" with a CFG scale of gamma=7.

Sample 1

Sample 2

Sample 3

Sample 4

Sample 5
1.7 Image-to-image Translation
In this part, we add variuos amounts of noise to our input image and pass it into iterative_denoise_cfg. Adding more noise causes the model to "hallucinate" new things, forcing it to be "creative" -- one way to think about it is that the denoising process "forces" a noisy image back onto the manifold of natural images.

SDEdit with i_start=1

SDEdit with i_start=3

SDEdit with i_start=5

SDEdit with i_start=7

SDEdit with i_start=10

SDEdit with i_start=20
Campanile

SDEdit with i_start=1

SDEdit with i_start=3

SDEdit with i_start=5

SDEdit with i_start=7

SDEdit with i_start=10

SDEdit with i_start=20

Tiramisu/Cake

SDEdit with i_start=1

SDEdit with i_start=3

SDEdit with i_start=5

SDEdit with i_start=7

SDEdit with i_start=10

SDEdit with i_start=20

Golden Gate Bridge
1.7.1 Editing Hand-Drawn and Web Images
We now try the same with nonrealistic image. I have chosen a cartoon drawing of a table and have also drawn three images myself.

Table at i_start=1

Table at i_start=3

Table at i_start=5

Table at i_start=7

Table at i_start=10

Table at i_start=20

Table Clipart

Star and Moon at i_start=1

Star and Moon at i_start=3

Star and Moon at i_start=5

Star and Moon at i_start=7

Star and Moon at i_start=10

Star and Moon at i_start=20

Star and Moon

Car at i_start=1

Car at i_start=3

Car at i_start=5

Car at i_start=7

Car at i_start=10

Car at i_start=20

Car

Flower at i_start=1

Flower at i_start=3

Flower at i_start=5

Flower at i_start=7

Flower at i_start=10

Flower at i_start=20

Flower in a pot
1.7.2 Inpainting
This time, we do inpainting with a mask. We create a new image that has the same content where m=0 and new content wherever m=1. It is pretty cool how the picture of Campanile became a picture of a person wearing a Campanile-dress. Otherwise, the inpainting worked out very nicely for the deer and the sunset.
Campanile

Mask

Hole to Fill

Campanile Inpainted

Deer

Mask

Hole to Fill

Deer Inpainted

Sunset

Mask

Hole to Fill

Sunset Inpainted
1.7.3 Text-Conditional Image-to-image Translation
This time, we guide the projection with a text prompt. Down below, I have a picture of the Campanile morphing to a rocket, a cat morphing to a dog, and a donut morphing to a painting of people sitting around a campfire.

Rocket Ship at i_start=1

Rocket Ship at i_start=3

Rocket Ship at i_start=5

Rocket Ship at i_start=7

Rocket Ship at i_start=10

Rocket Ship at i_start=20
Campanile

Dog at i_start=1

Dog at i_start=3

Dog at i_start=5

Dog at i_start=7

Dog at i_start=10

Dog at i_start=20

Cat

Campfire at i_start=1

Campfire at i_start=3

Campfire at i_start=5

Campfire at i_start=7

Campfire at i_start=10

Campfire at i_start=20

Donut
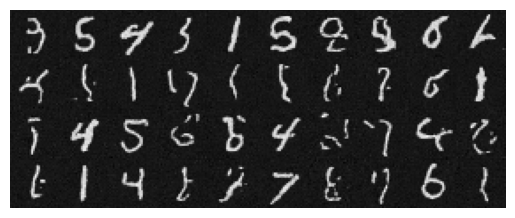
1.8 Visual Anagrams
Now, we create visual anagrams by obtaining the noise estimate for the upright and upside down images, averaging them, and performing a reverse/denoising diffusion step with the averaged noise estimate. The first anagram is of "an oil painting of an old man" and "an oil painting of people around a campfire", the second anagram is of "a rocket ship" and "a pencil", and the third anagram is of "a photo of the amalfi cost" and "a photo of a dog".

an oil painting of an old man

an oil painting of people around a campfire

a rocket ship

a pencil

a photo of the amalfi coast

a photo of a dog
1.9 Hybrid Images
This time, we implement Factorized Diffusion and create hybrid images. We create three images down below (the first description is when the image is far away, and the second description is when the image is close up). I tried making many images of the barista and the dog, and one observation that I had was that oftentimes it was either the case that the dog image never really appeared or was incorporated into the barista's apron.

Hybrid image of a skull and a waterfall

Hybrid image of a rocketship and a snowy village

Hybrid image of a barista and dog